
工业机器人在激光切割领域应用分析
1 引言
随着汽车业、军工及重工等行业的飞速发展,这些行业中的三维钣金零部件和特殊型材的切割加工呈现小批量化、多样化、高精度化的趋势。工业机器人和光纤激光所组成的机器人激光切割系统一方面具有工业机器人的特点,能够自由、灵活的实现各种复杂三维曲线加工轨迹,另一方面采用柔韧性好、能够远距离传输激光光纤作为传输介质,不会对机器人的运动路径产生限制作用。相对于传统的加工方法,机器人激光切割系统在满足精确性要求的同时,能很好地提高整个激光切割系统的柔性,占用更少的空间,具有更高的经济性和竞争力。
2 ABB机器人相关技术
与点焊、搬运等运动控制所不同的是,激光切割是基于连续工艺状态下的运动控制,除了要求机器人具有较高的运动点的精度和重复定位精度外,还对机器人运动的轨迹即机器人的直线和圆弧轨迹插补的精度提出了很高的要求。激光切割中的倒角切割和小圆切割的精度和稳定性能够很好的衡量机器人的运动控制能力。ABB利用自身强大的研发实力开发了一系列的高端技术,来满足市场的需求。所开发的True Move和Quick Move技术能够很好地解决高速情况下倒角切割的精度问题,Advanced Shape Tuning和Wrist Move技术则能够很好地解决小圆切割的精度问题。同时,结合ABB的离线编程仿真软件Robot Studio和良好的人机交互接口Flexpendant及人机界面,使得整个激光切割系统在满足客户技术要求的前提下,容易操作及管理。
2.1 True Move和Quick Move技术
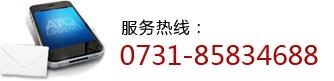
如图1所示,传统机器人在低速情况下实际路径与编程路径相吻合,但是在高速情况下做转弯运动时,实际路径就会偏离编程路径。基于高级前馈伺服控制技术的True Move极大的提升了运动控制精度,解决了机器人在高速情况下实际运动路径偏离编程路径的问题,真正实现了所编即所得。
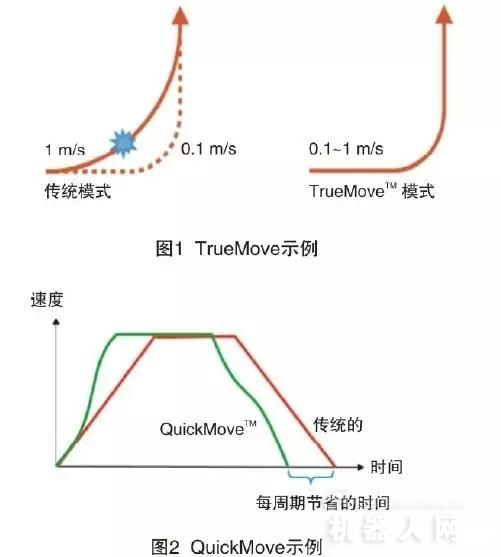
如图2所示,传统机器人在速度上升和下降的过程中加速度保持不变,相应的完成一个动作节拍的时间也较长。基于高级动力模型控制技术的Quick Move可以精确控制机器人的加减速度和稳定速度,通过使机器人任意时刻的加速度最大化来减少动作节拍时间。
2.2 Advanced Shape Tuning和Wrist Move技术
ABB开发的Advanced Shape Tuning软件能够补偿机器人轴摩擦力功能,对机器人在走复杂的三维切割路径时的微小抖动、共振等情况做及时、精确的补偿。这些功能包含在机器人的选项中,应用时客户只需要调用相应的功能模块,机器人就能根据指令重复走所编程的路径并且自动获得各个轴的摩擦参数。
Wrist Move是使机器人在切割时1、2、3轴不动,只有机器人运动末端4、5、6轴进行运动,这就避免了1、2、3轴运动时轴摩擦力对小圆切割路径造成的不良影响。
2.3 离线编程仿真和人机交互接口
Robot Studio是ABB开发的离线编程与仿真软件,可在电脑上完成几乎所有的机器人编程与仿真。如图3所示,通过Robot Studio能够实现十分逼真的模拟,并且所用的均为实际使用的机器人程序和配置文件。配合ABB Absolute Accuracy校正系统,可以使模拟结果达到很高的精度。Robot Studio还可方便地导入IGES、STEP、CATIA等主流CAD格式数据,然后依据这些精确的数据编制机器人程序。使用软件中的AutoPath功能,仅在数分钟之内便可自动生成跟踪加工曲线所需要的机器人位置(路径),很好地解决了激光切割中复杂切割曲线无法通过示教产生的问题,大大节约了编程时间。

ABB机器人采用触摸屏式的示教器FlexPendent,配合示教器上的摇杆和简洁的按键设计,使用十分方便。同时,ABB新开发的专用切割操作软件具有良好的激光切割人机界面,将切割参数设置、轴摩擦力调整及I/O监控等界面以图形化、数字化等形式显示在示教器上,界面十分友好,便于使用人员对系统进行状态监控和操作。
下一篇:如何做好激光切割
热门搜索词:激光切割,碳钢激光切割加工,钣金制作激光切割,长沙精正激光切割,株洲激光切割
品牌官网:www.jzjgqg.com
相关资讯
- 激光切割加工的出现改变了传统切割方法....(2016.09.19)
- 浅谈激光切割加工在钣金加工行业之中优....(2016.09.13)
- 盘点:激光切割加工机的7大优势(2016.09.01)
- 市场上用户对激光切割加工设备的要求越....(2016.08.31)
- 激光切割有哪些奇异的本领(2015.12.07)
- 激光切割加工中capp系统的设计与研究(2015.11.29)











